ZMR250 – FPV Quadcopter Bauen – Einstieg
Ich berichte hier von meinem Einstieg in die Welt der 250er Race FPV Quadcopter.
Diese Serie sind kleine, wendige und sehr schnelle Copter, mit denen man Rennen oder Kunstflüge fliegt. Sie haben eine kleine Kamera und der Pilot nutzt einen Bildschirm oder eine Videobrille und steuert ausschließlich anhand des übertragenen Kamerasignals. (FPV – First Person View)
Bitte mein Setup nicht als Anleitung verstehen, ich schreibe hier lediglich über meine eigenen Erfahrungen und meinen Aufbau. Ich werde sicher auch den ein oder anderen Fehler machen, dieses Thema ist einfach viel zu neu und umfangreich als dass man gleich alle Tricks kennt. Für Tipps und Kritik bin ich jederzeit offen und dankbar.
Erste Bestellung der Basisteile:
Ich habe die meisten Komponenten in China, genauer von Banggood.com bestellt, da die meisten Teile sowieso von dort kommen und nach meiner Erfahrung qualitativ absolut in Ordnung sind.
Das Manko sind sicher die Lieferzeiten mit bis zu 2 Monaten.
Chassi:
ZMR250
Carbon, 4MM Ausleger, entkoppelte Plattform für die Kamera, viel Zubehör erhältlich
Diatone ZMR250 Power Distribution Board
Eine Leiterplatine, die eine der unteren Carbonplatten ersetzt, um die Verkabelung zu erleichtern
Controller:
CC3D
Mit Plastikgehäuse, Open Source Software, angeblich leicht zu konfigurieren, günstig(15€)
Motoren:
DYS BE1806 2300KV
Sehr gute Preis-Leistung, viele positive Bewertungen und Empfehlungen im Netz
ESCs:
12A Emax SimonK
12A gut für den Einstieg mit etwas Luft nach Oben
Fernbedienung/Empfänger:
FlySky Upgraded
9 Kanal 2,4ghz Fernsteuerung, Mode2, mit Empfänger, Günstig (77€)
(Fehlkauf, da die Reichweite nicht so gut ist und die Software gelinde gesagt bescheiden ist. Besser also etwas mehr Geld für eine FrSky oder eine Spektrum ausgeben!)
Ich habe die schlechte Firmware mittlerweile ersetzt. Mehr dazu unter: FlySky TH9X Firmware flashen
Videoübertragung:
Sender:
Eachine TS832
32Kanäle, 5,8 Ghz, 600mW
Empfänger:
Eachine RC832
32Kanäle, 5,8 Ghz
Antennen:
Empfänger/Sender Mushroom Antennen, abgewinkelt
Kamera:
Mobius V3
Weitwinkel, 1080P, Live Video Out, Akku
Akkus:
4x Turnigy Nano-Tech Akku
11,1V (3s) 1300mah 45C
Akkutasche:
Feuerfester Akkubeutel
Da die LiPos etwas empfindlich sind, habe mich mir eine feuerfeste Tasche zum Laden und zum Transport besorgt
Ladegerät:
iMax B6 LiPo Ladegerät
1s – 6s, kann balance-charge, diverse Anschlüsse und Adapter, verbreitetes Gerät
Propeller:
Diverse Rotoren (insgesamt 24 paar), da ich hier keine Erfahrung habe
Gemfan 5030
Diatone 5030
Gemfan 5030 3-Blättrig
Kingkong 5040
Zubehör/Kleinkram:
Bluetooth Debugger:
Zum Verbinden des Controllers per Bluetooth an PC oder Smartphone
Batteriewarner
Wird an den Lipo angesteckt und Piept beim Erreichen der Untergrenze.
Auch zum Schnelltesten der Akkus vor dem Flug.
Sonstiges:
Diverse Stecker und Kabel
Erste Lieferung nach Ca 3 Wochen:

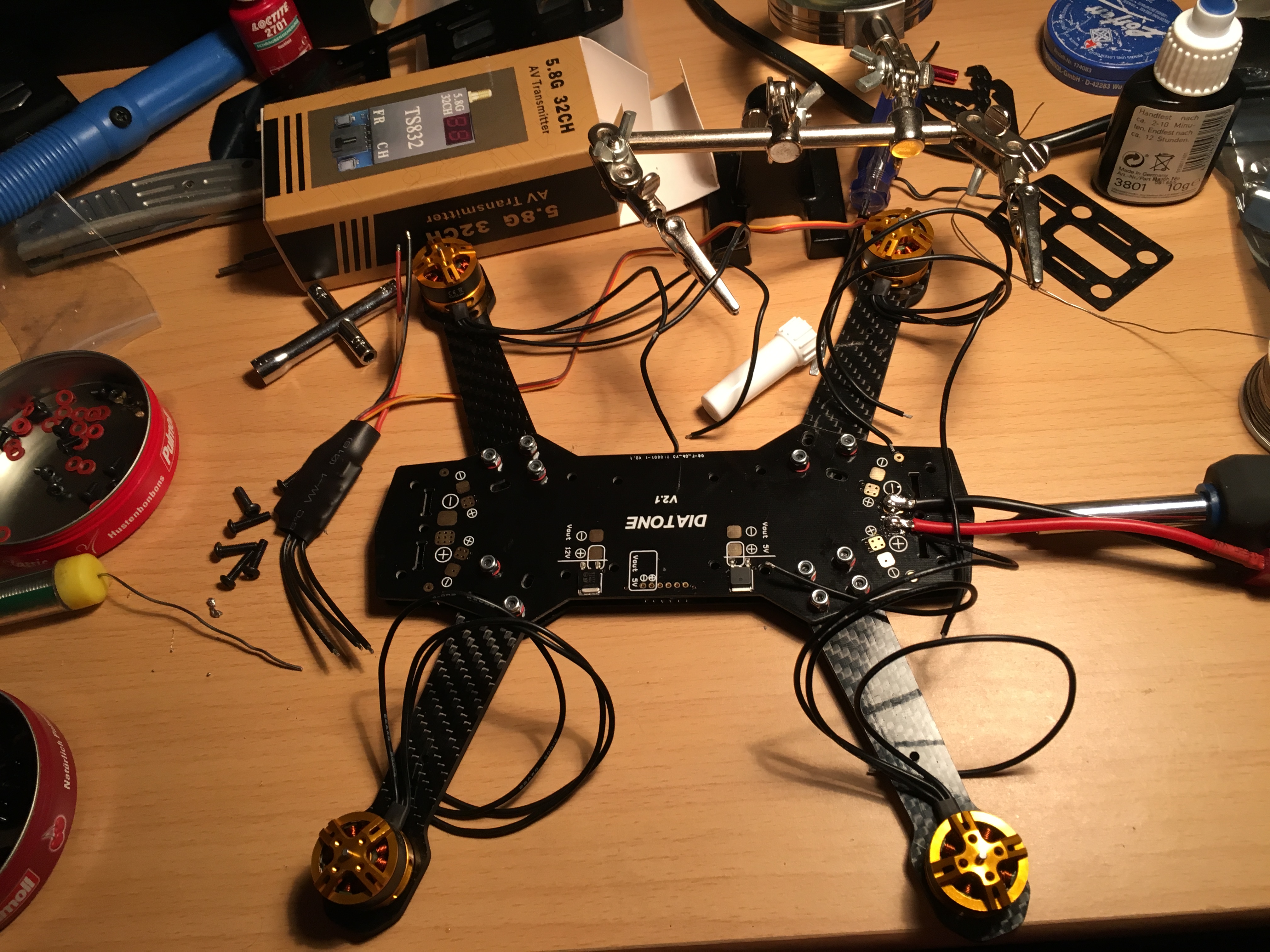
Aufbau des Rahmens mit dem Power Distribution Board.
Meine Akkus haben eine T-Buchse, deshalb habe ich einen T-Stecker verlötet.

Befestigen der Motoren
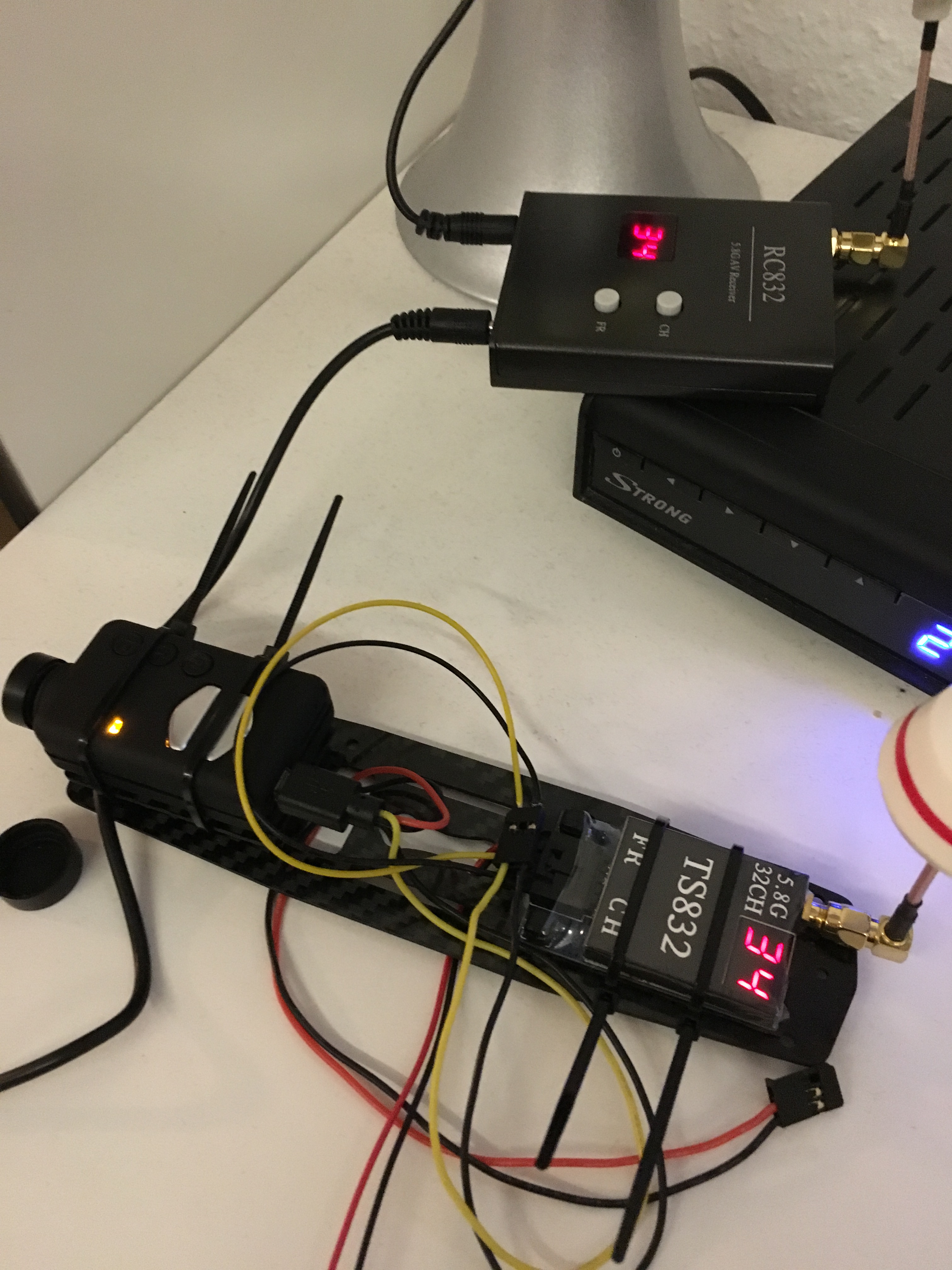
Da aktuell noch meine Fernsteuerung und somit auch mein Empfänger fehlt, teste ich zunächst die FPV-Übertragung.

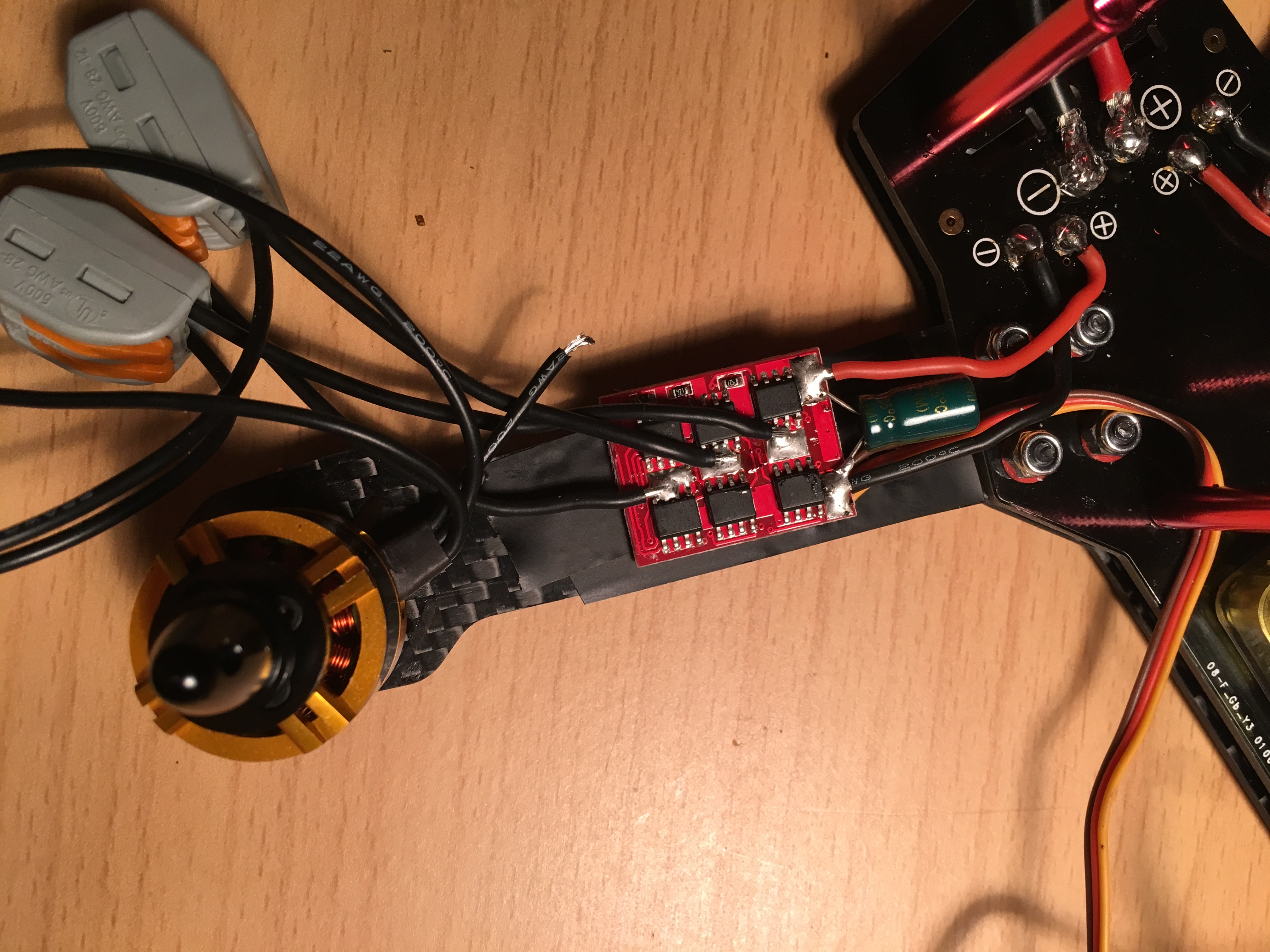
ESCs verlöten
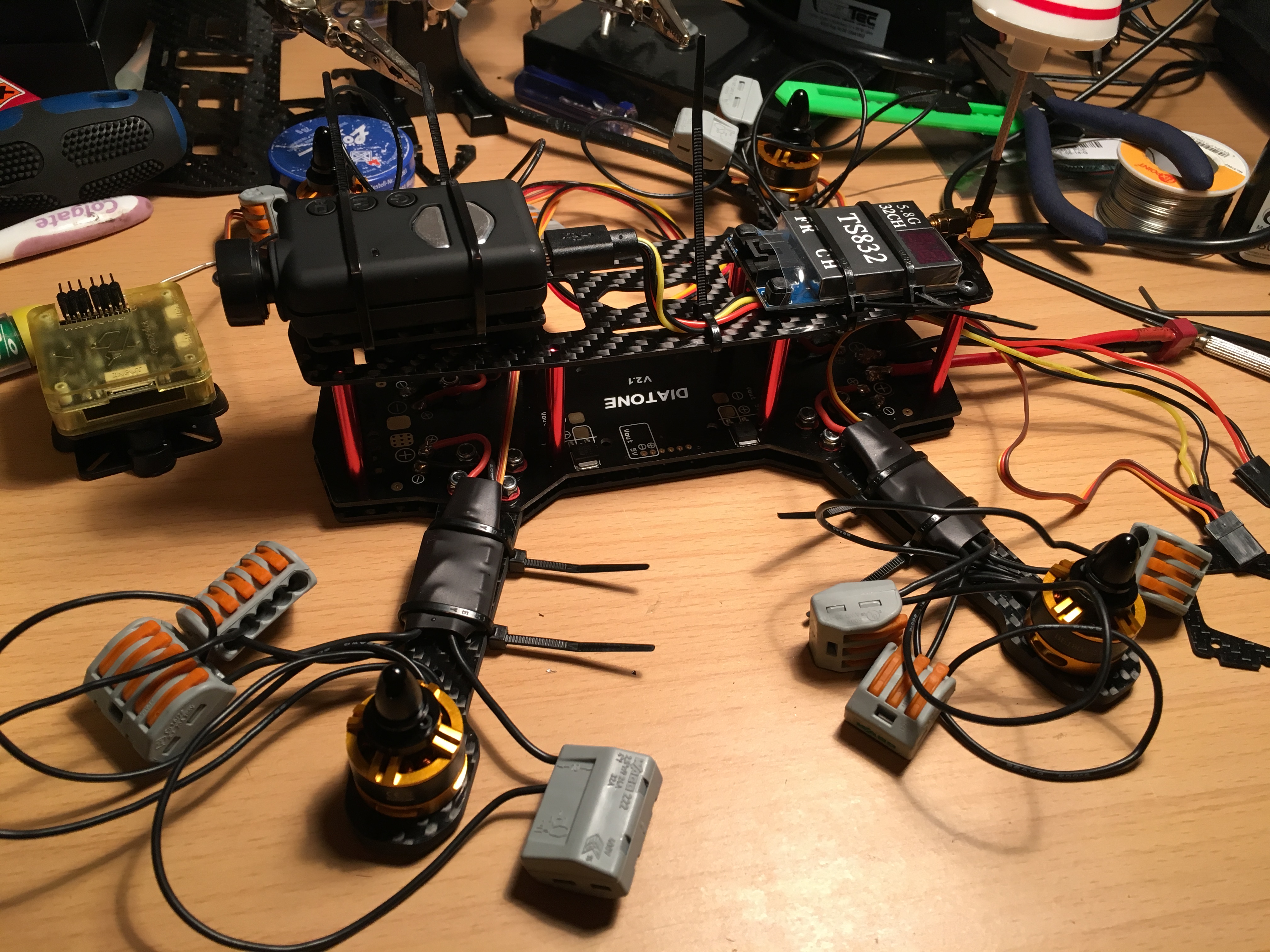
Alles einbauen



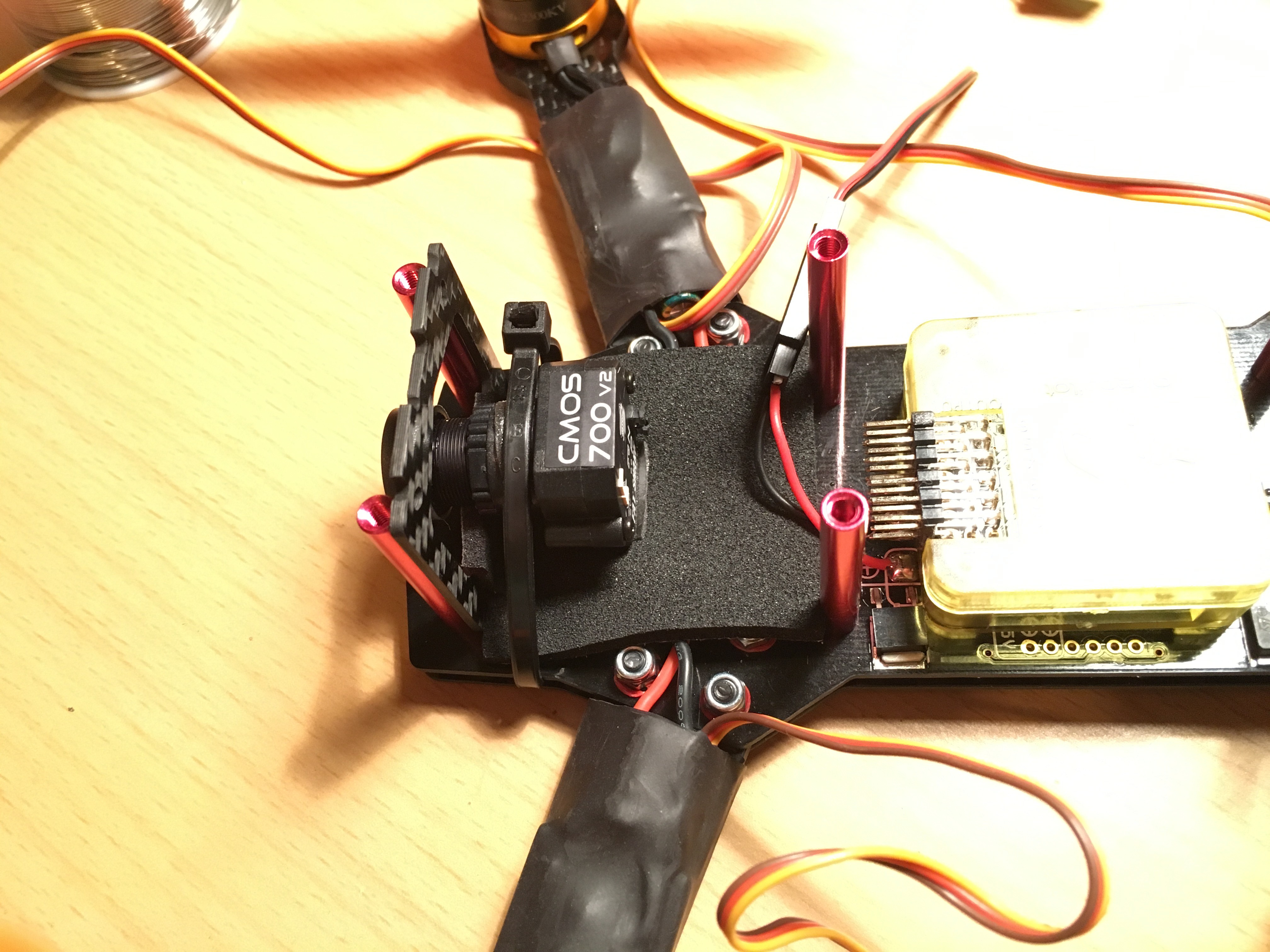
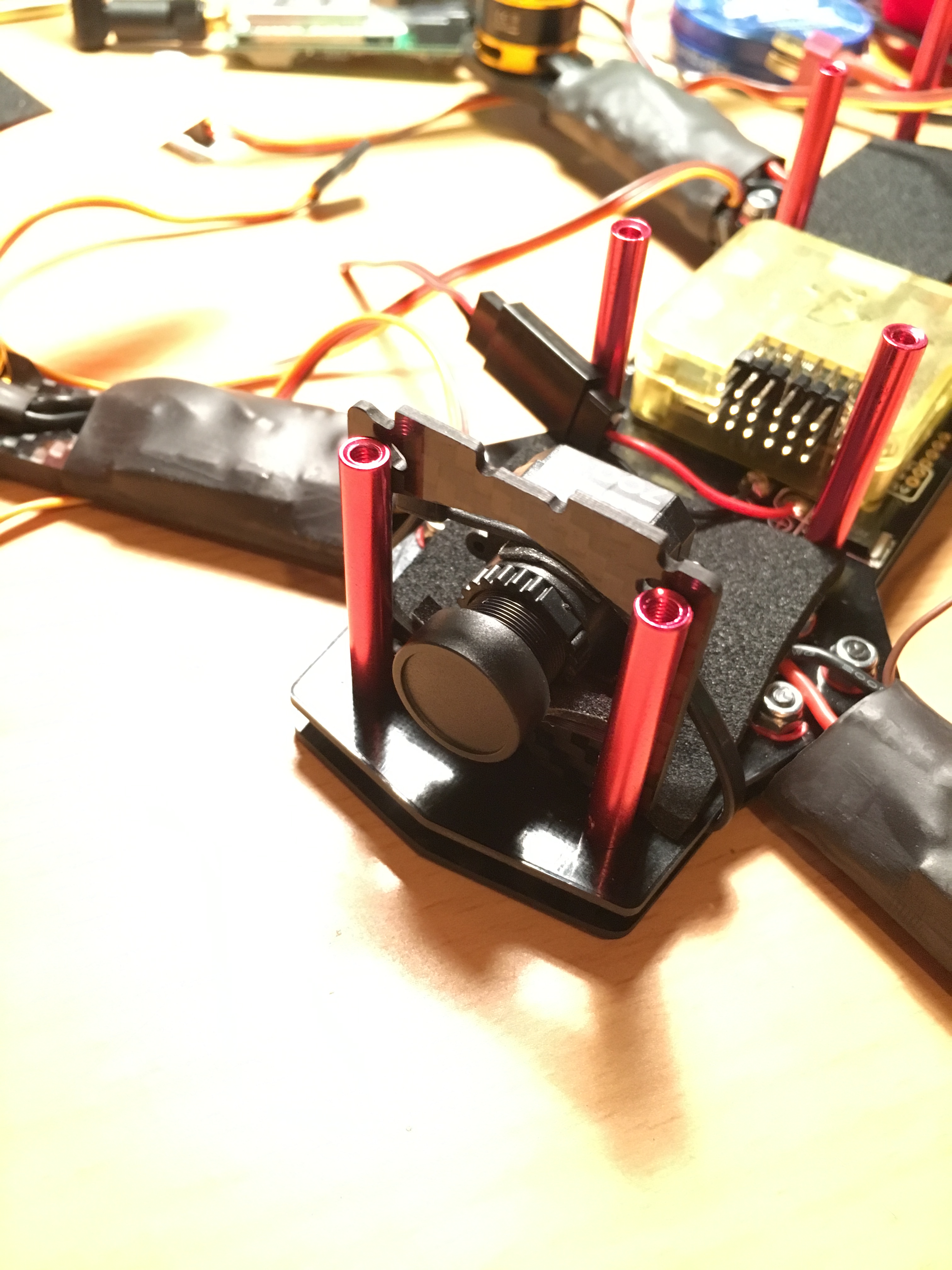
Einbau der FPV-Kamera und des Senders


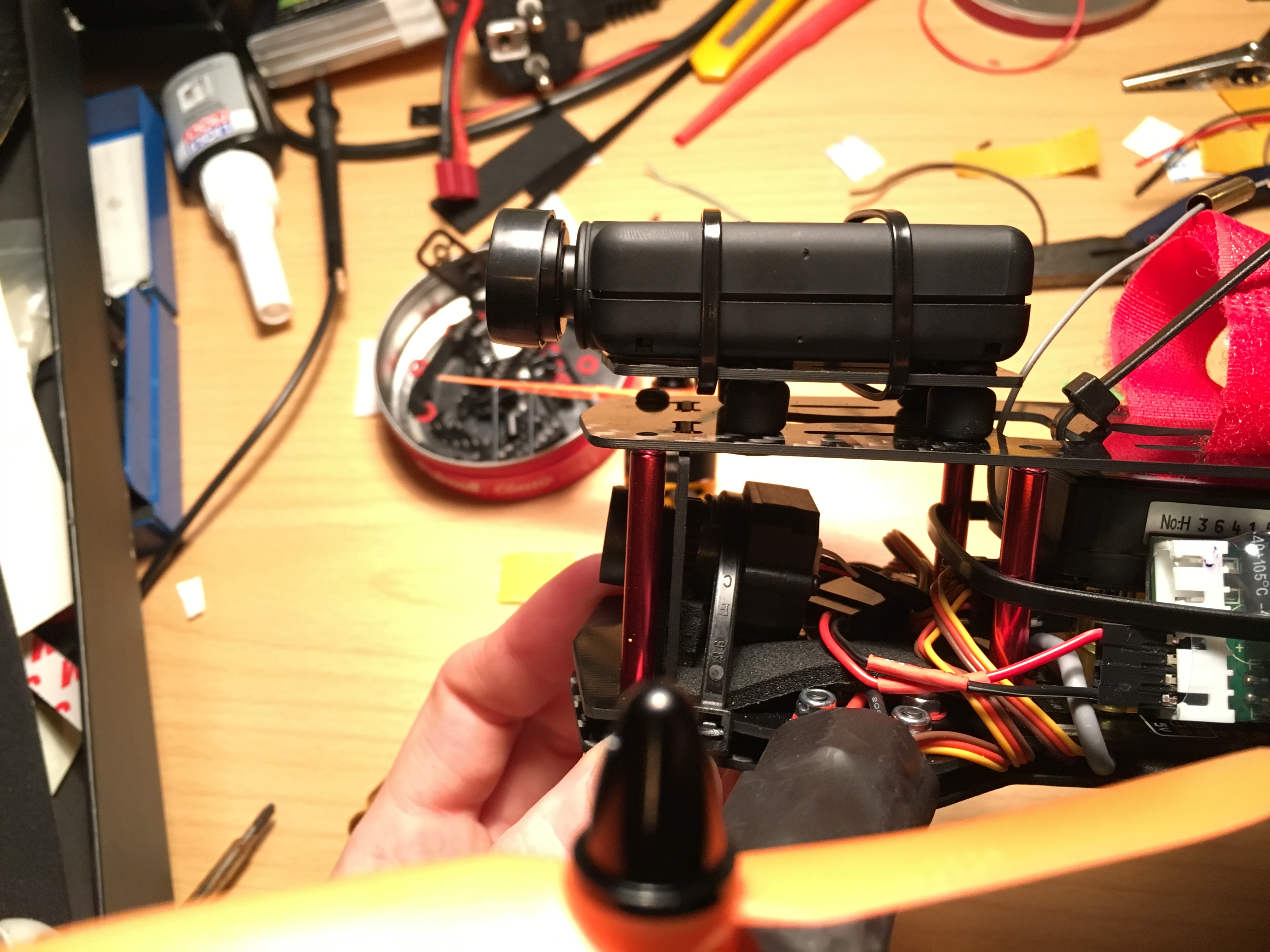
Gewicht

Neue Akkus

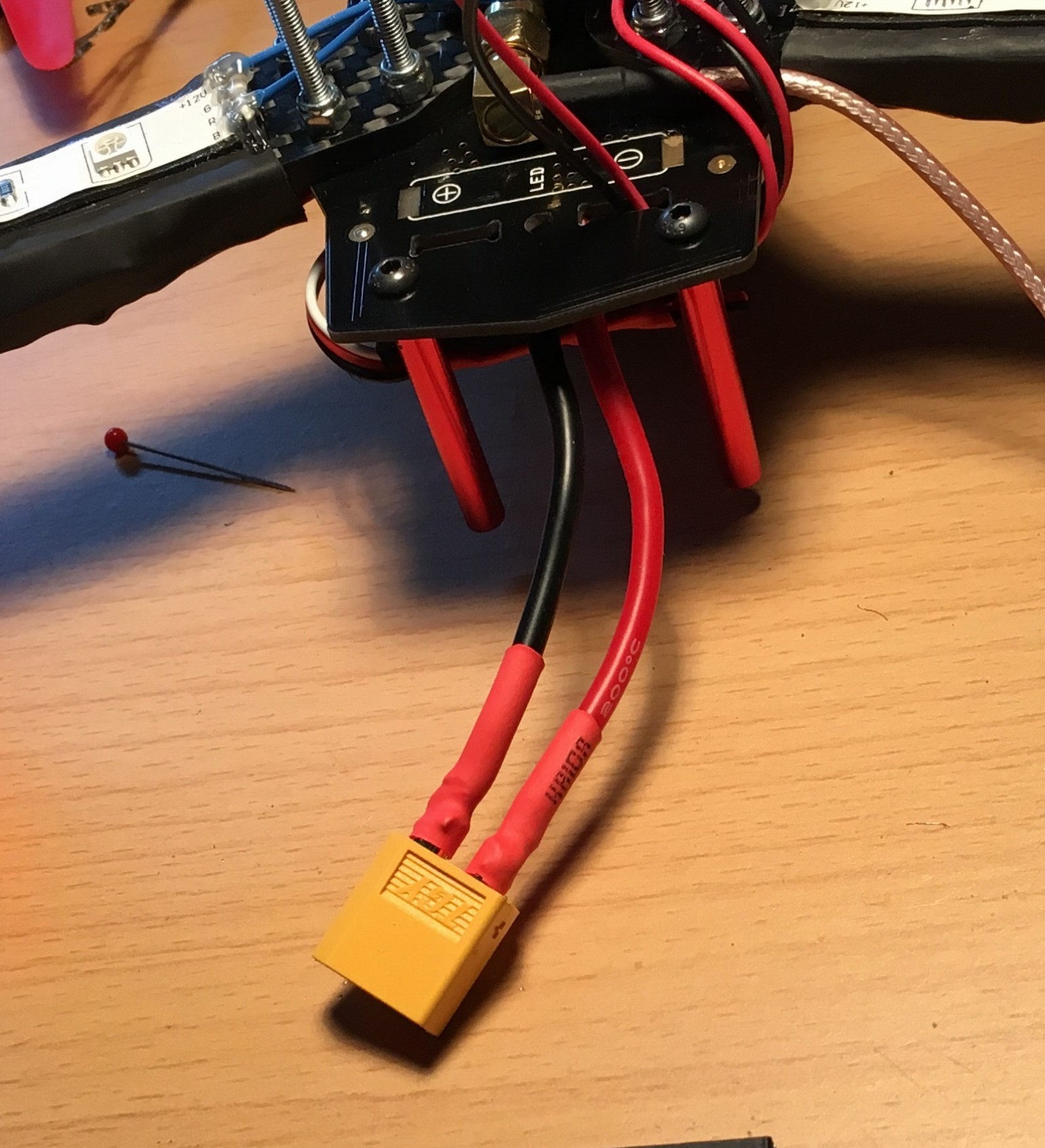
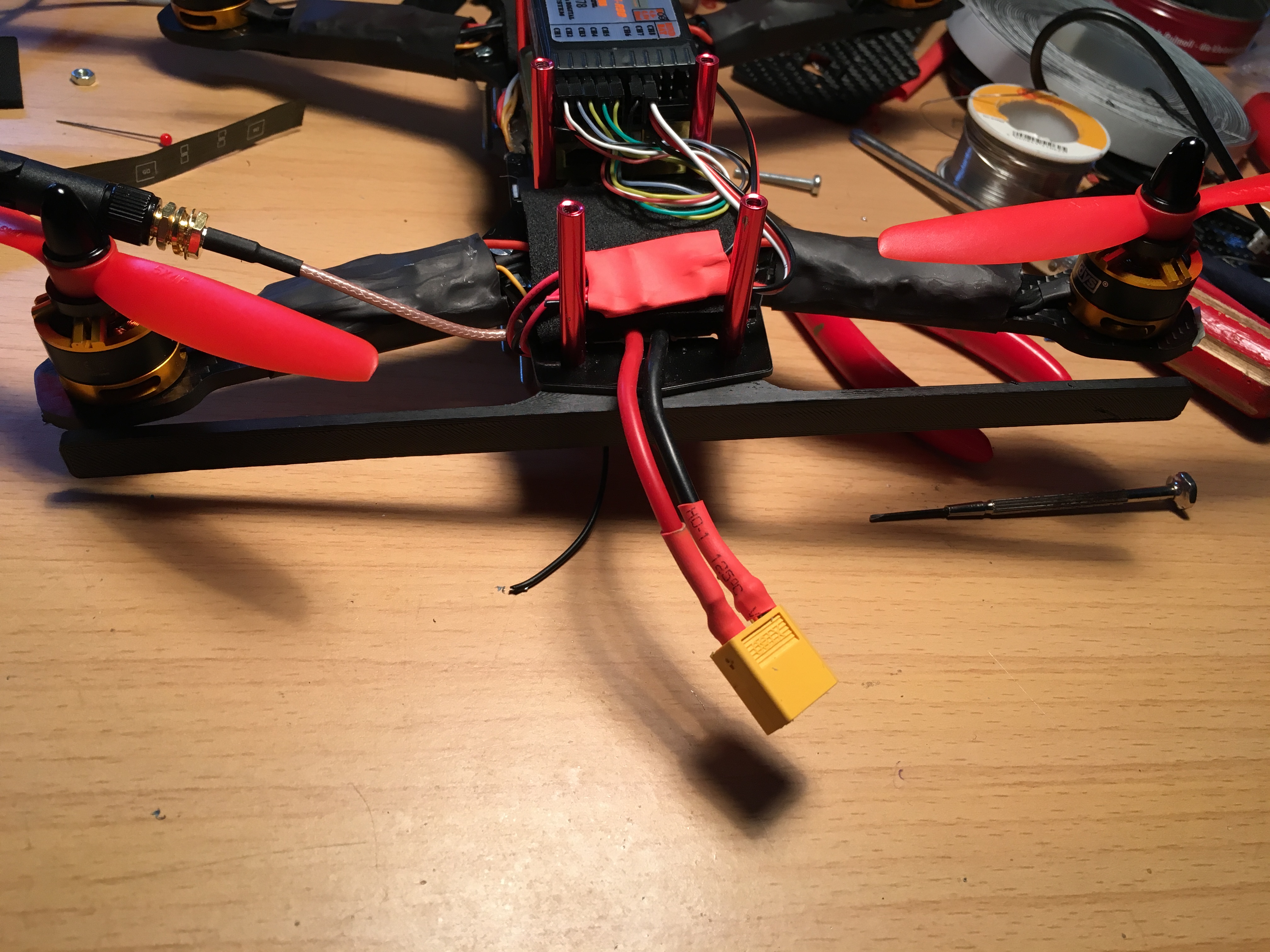
Aufgrund der Akkus mit XT-60-Stecker habe ich auch meinen Copter auf XT-60 umgebaut.
T-Stecker vs XT-60
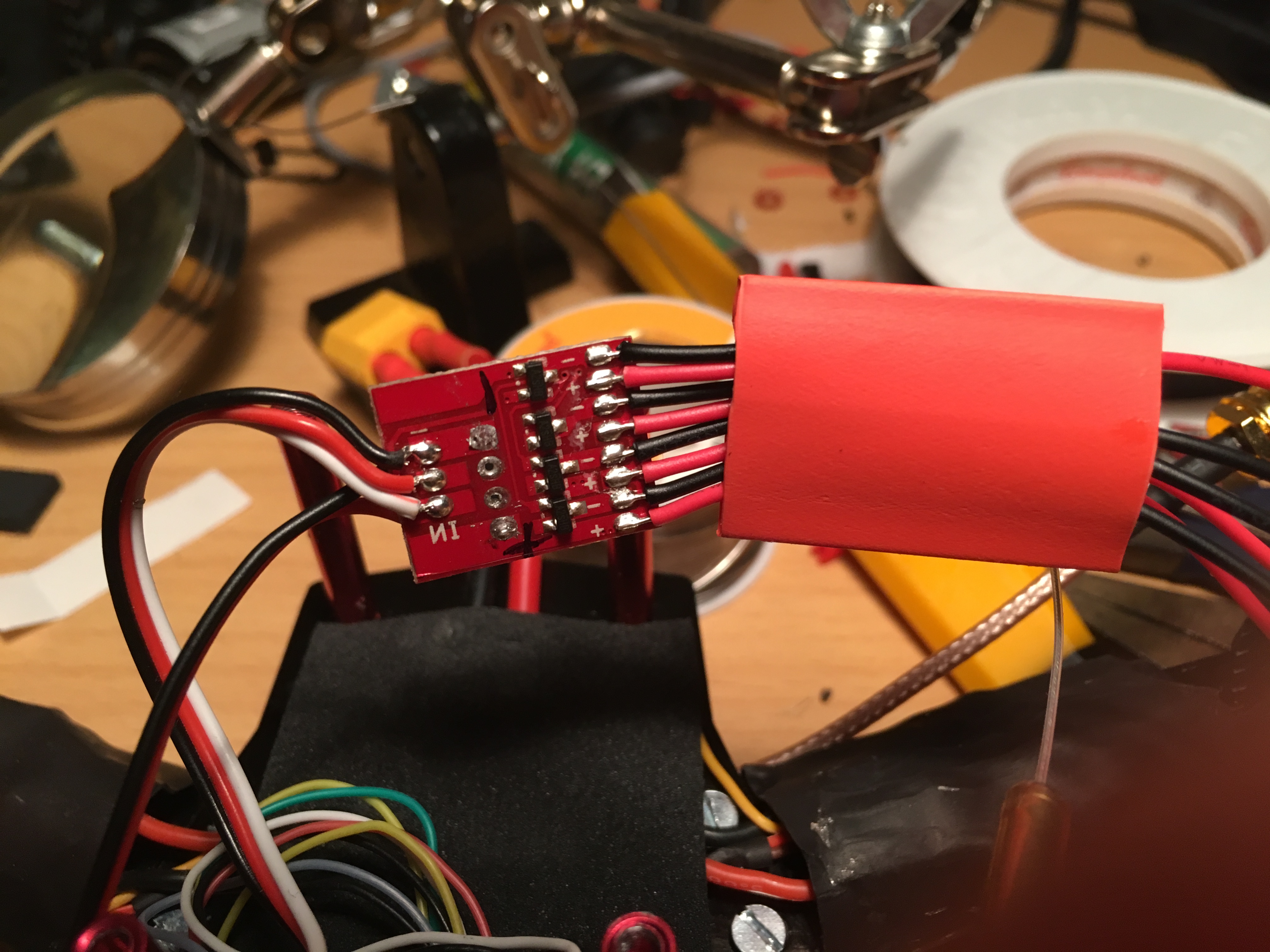
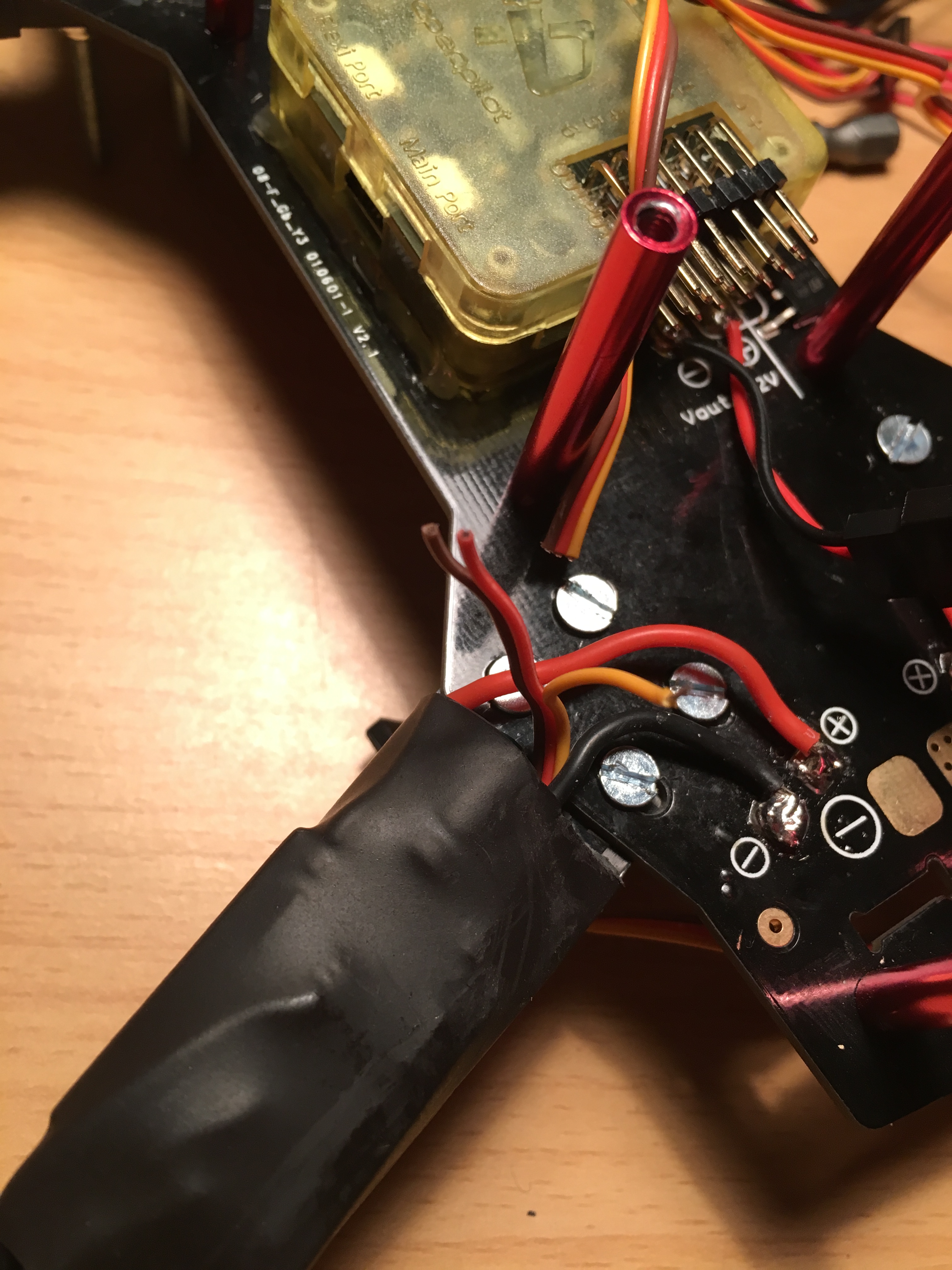
LEDs
Ich habe mich für einen kleinen LED-Controller entschieden. Dieser bekommt das Signal direkt vom Empfänger und man kann somit an der Fernsteuerung die LEDs kontrollieren.

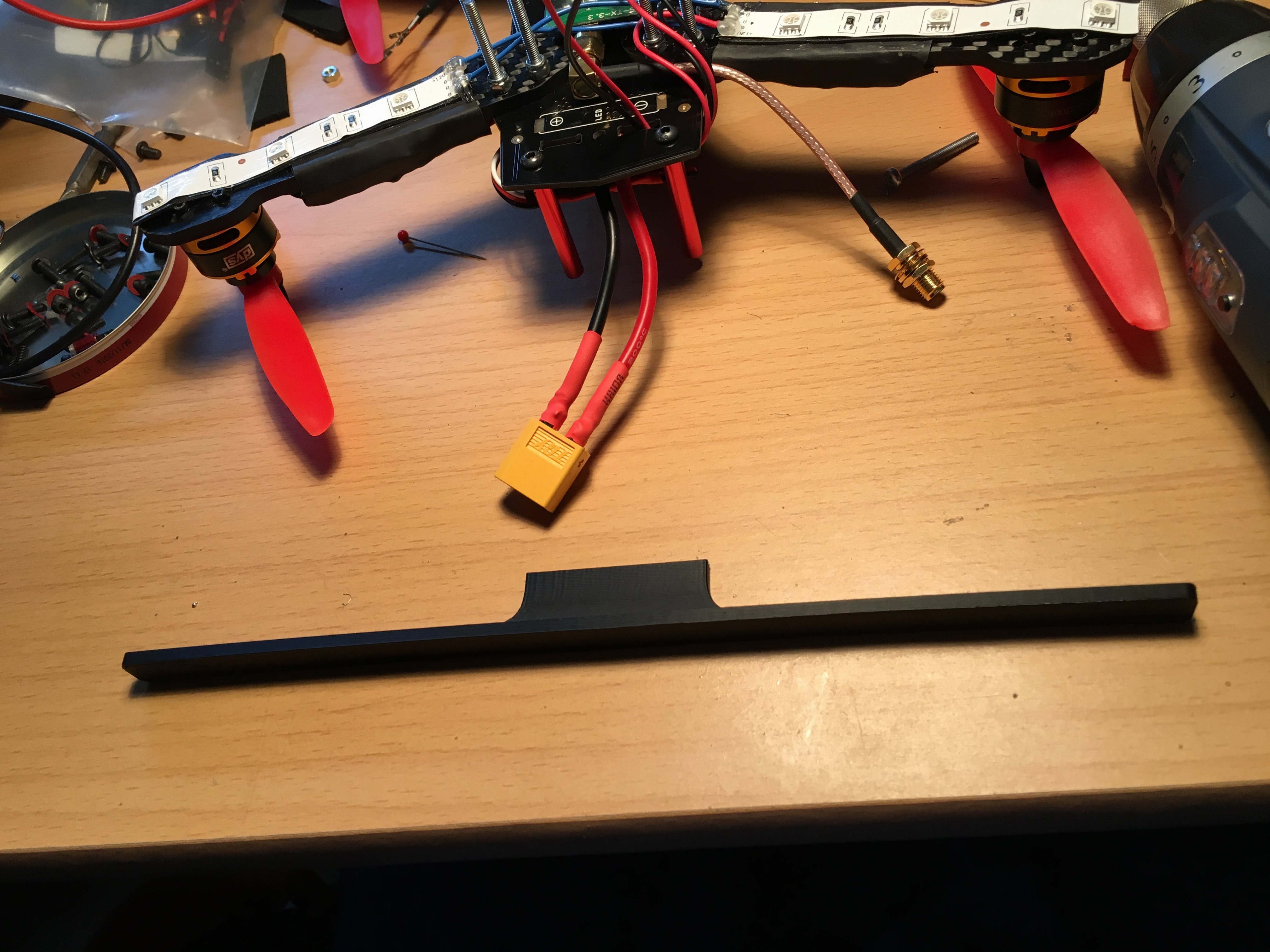
Zusätzlich zu den unteren LEDs wollte ich noch eine Leiste am Heck anbringen. Ein Kollege hat mir dafür ein passendes Teil im 3D-Drucker gedruckt. Vielen Dank nochmal.
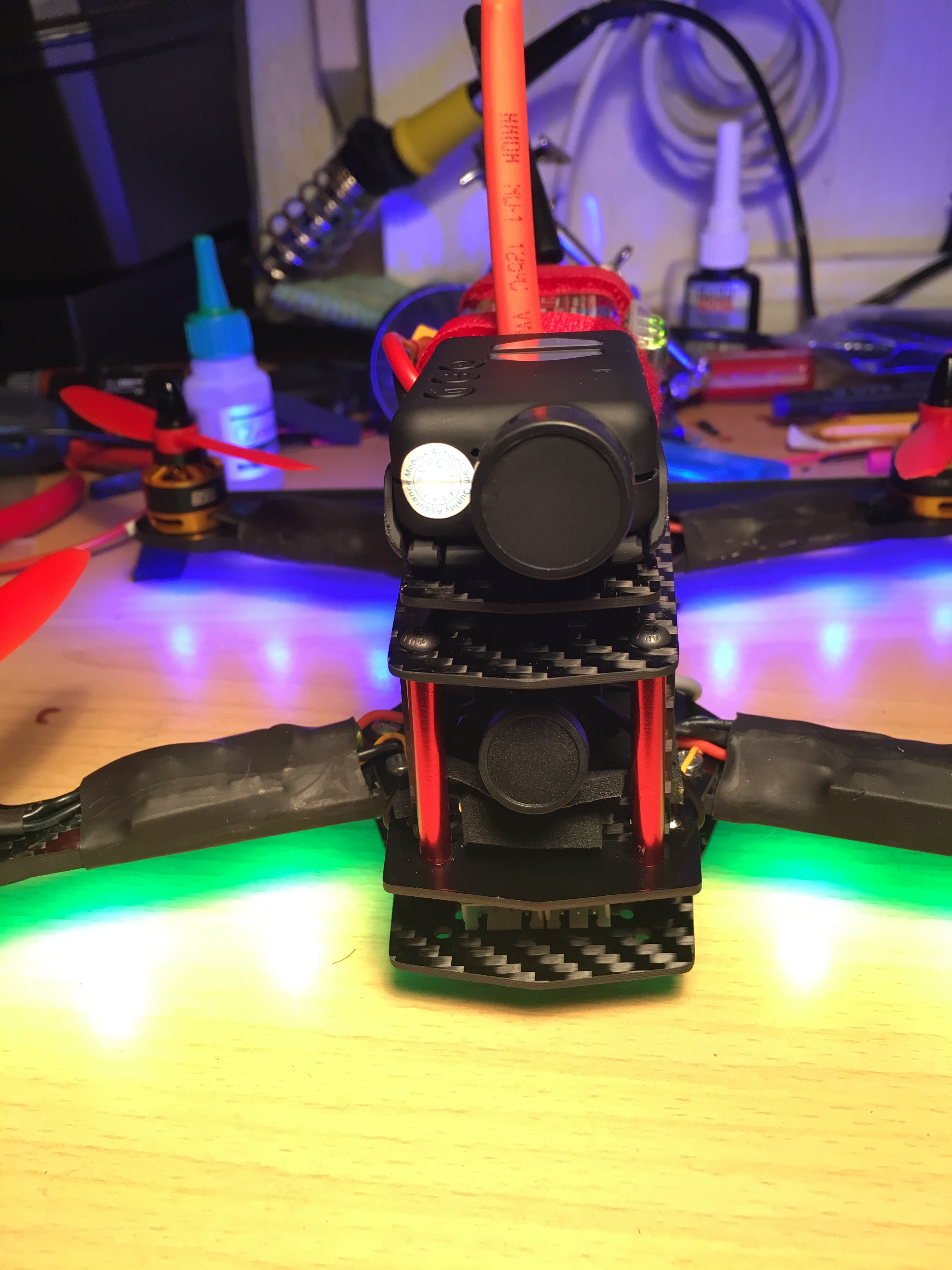
Umbau
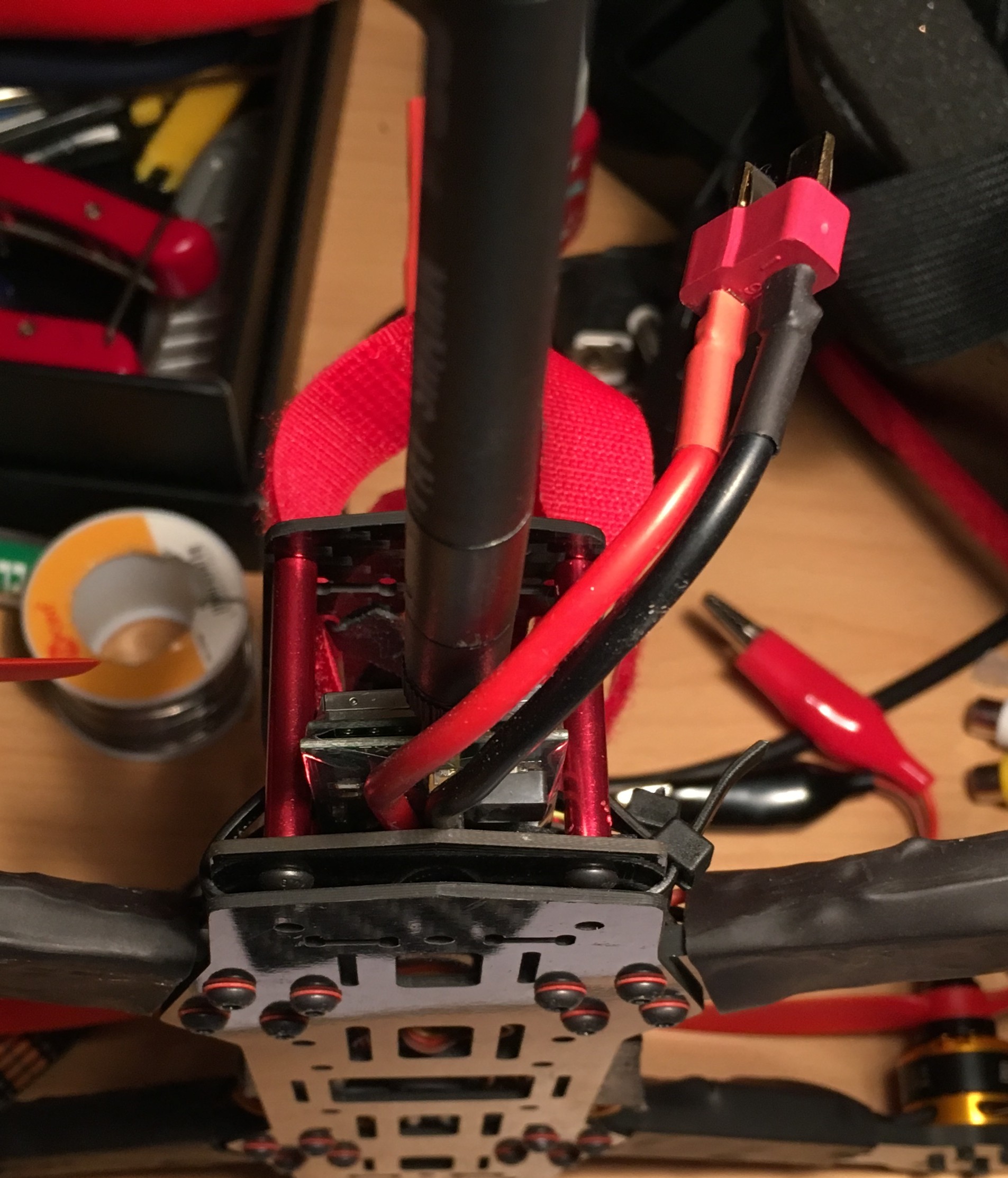
Da nicht mit dem herausstehenden Videosender am Heck des Copters zufrieden war, und auch die Kabelführung noch verbesserungswürdig war, habe ich mich für einen Umbauaktion entschieden.
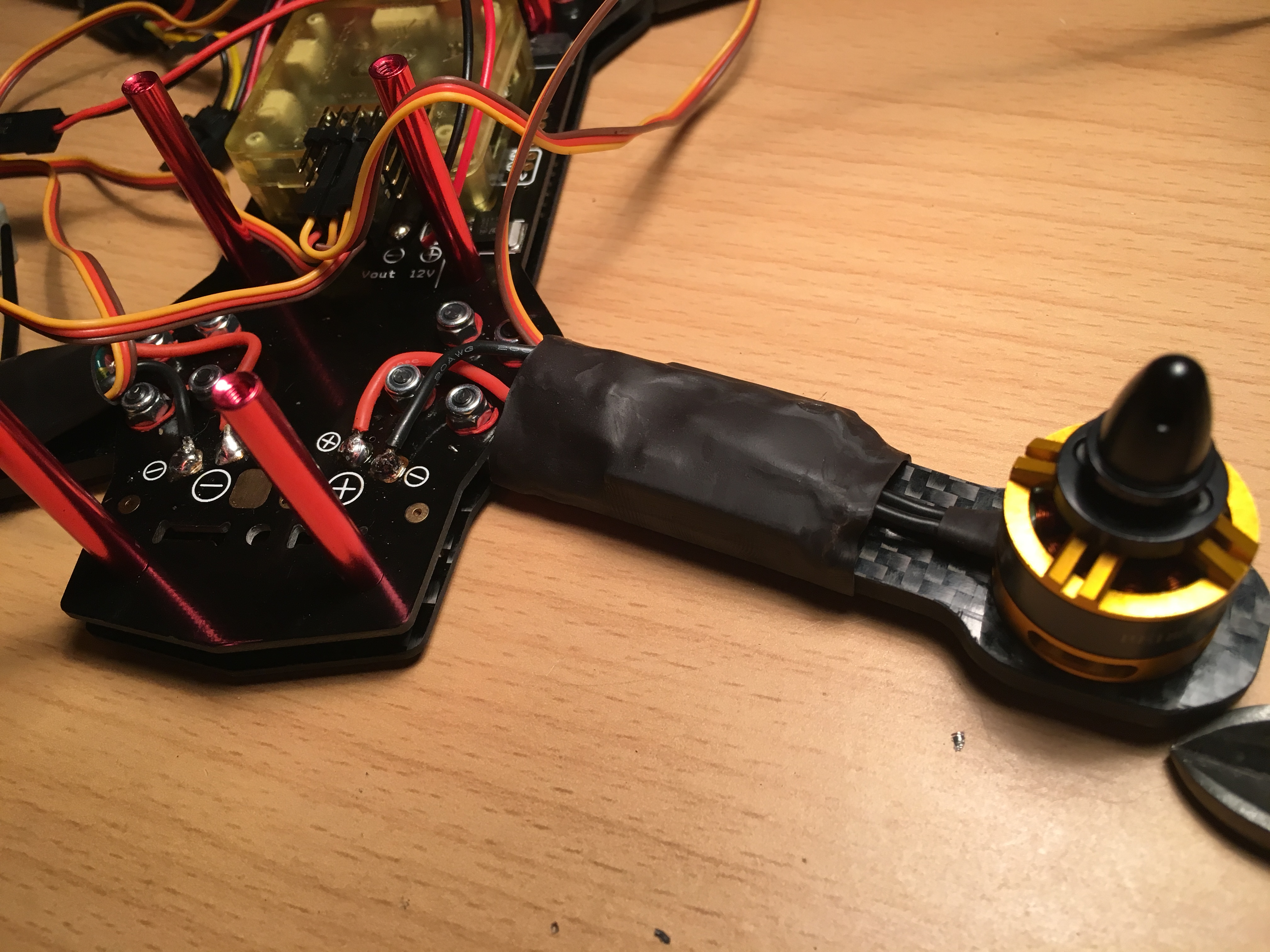
Den Abstand zwischen dem Power Distribution Board und der Bodenplatte des Rahmens habe ich deutlich vergrößert. Dadurch hatte der Videosender und der Spannunsfilter dazwischen platz. Die Antenne des Senders wurde anschließend verlängert und oben am Rahmen verschraubt.

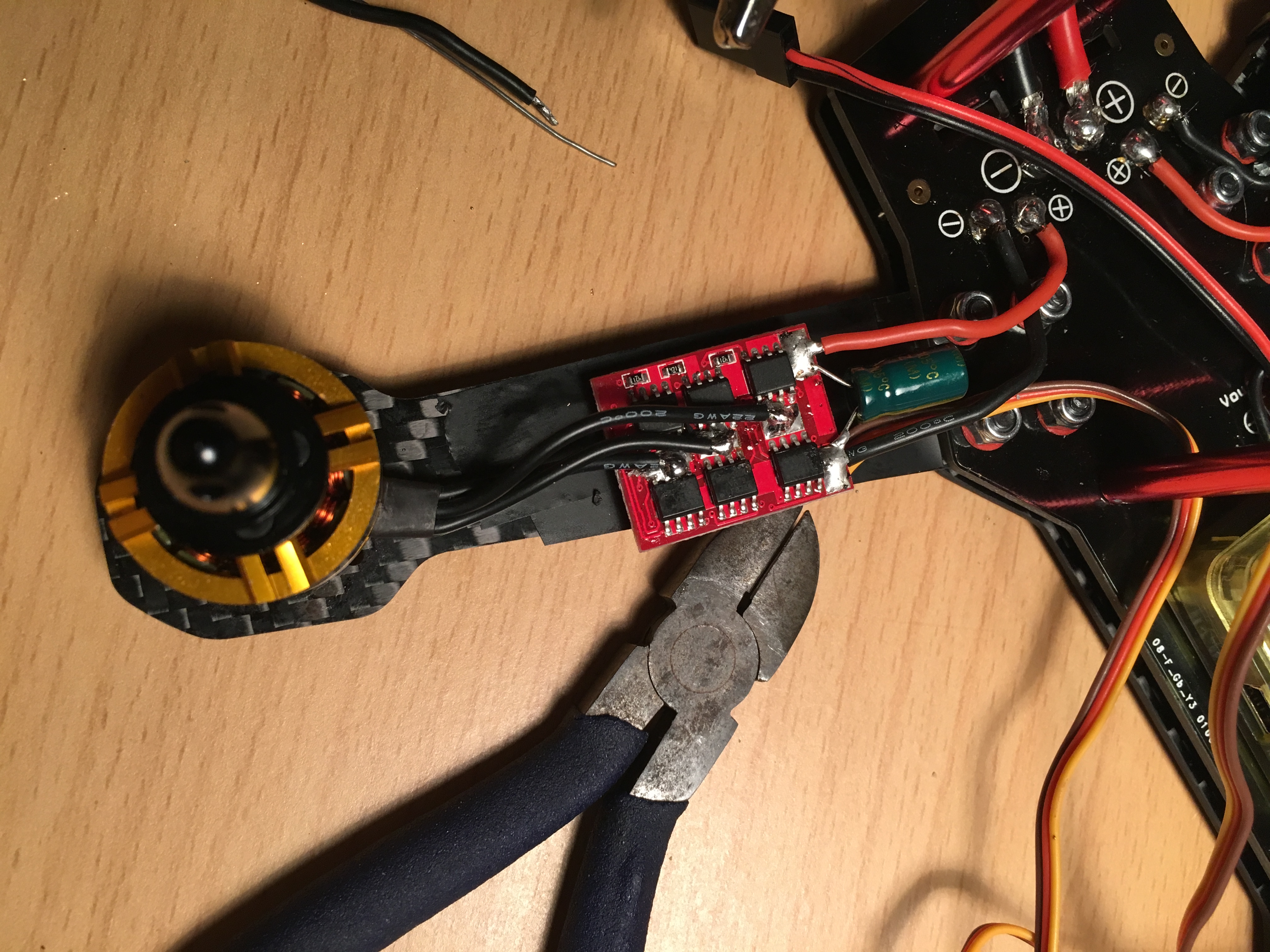
Kabel der ESCs kürzen und die BEC-Kabel entfernen.

Fertig, vorerst :D


Update:
Neue Spiro-Antennen von SpiroNet. Das Bild ist dadurch deutlich stabiler und die Reichweite ist viel besser.

